Introduction to Join Reorder
In real application scenarios, it is common to join multiple tables. The execution efficiency of join is associated with the order in which each table joins.
For example:
SELECT * FROM t1, t2, t3 WHERE t1.a=t2.a AND t3.a=t2.a;
In this query, tables can be joined in the following two orders:
- t1 joins t2, and then joins t3
- t2 joins t3, and then joins t1
As t1 and t3 have different data volumes and distribution, these two execution orders might show different performances.
Therefore, the optimizer needs an algorithm to determine the join order. Currently, the following two Join Reorder algorithms are used in TiDB:
- The greedy algorithm: among all nodes participating in the join, TiDB selects the table with the least rows to estimate its join result with each of the other tables respectively, and then selects the pair with the smallest join result. After that, TiDB continues the similar process to select and join other nodes for the next round, until all the nodes have completed the join.
- The dynamic programming algorithm: among all nodes participating in the join, TiDB enumerates all possible join orders and selects the optimal join order.
Example: the greedy algorithm of Join Reorder
Take the preceding three tables (t1, t2, and t3) as an example.
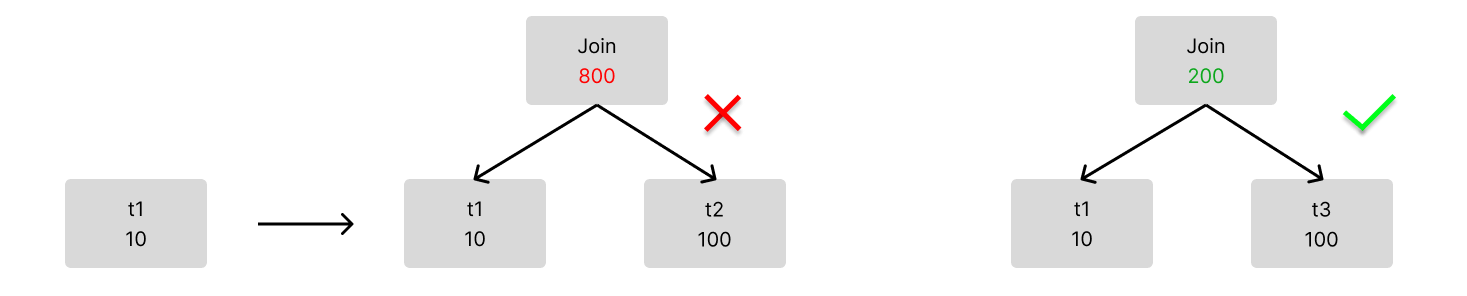
First, TiDB obtains all the nodes that participates in the join operation, and sorts the nodes in the ascending order of row numbers.

After that, the table with the least rows is selected and joined with other two tables respectively. By comparing the sizes of the output result sets, TiDB selects the pair with a smaller result set.
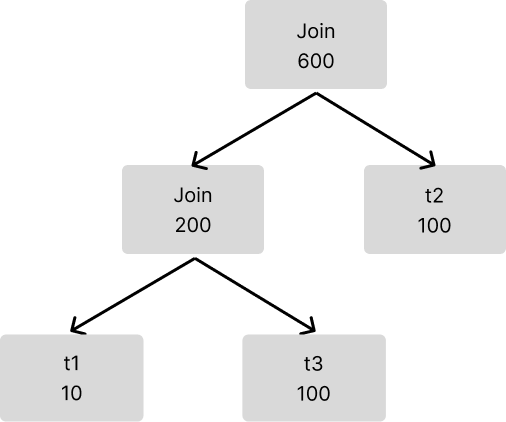
Then TiDB enters the next round of selection. If you try to join four tables, TiDB continues to compare the sizes of the output result sets and selects the pair with a smaller result set.
In this case only three tables are joined, so TiDB gets the final join result.
Example: the dynamic programming algorithm of Join Reorder
Taking the preceding three tables (t1, t2, and t3) as an example again, the dynamic programming algorithm can enumerate all possibilities. Therefore, comparing with the greedy algorithm, which must start with the t1 table (the table with the least rows), the dynamic programming algorithm can enumerate a join order as follows:
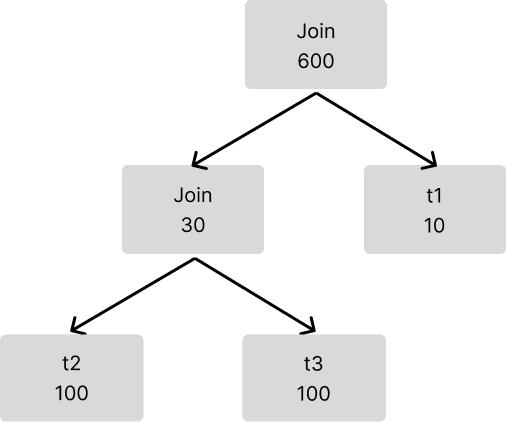
When this choice is better than the greedy algorithm, the dynamic programming algorithm can choose a better join order.
Because all possibilities are enumerated, the dynamic programming algorithm consumes more time and is more susceptible to statistics.
Selection of the Join Reorder algorithms
The selection of the TiDB Join Reorder algorithms is controlled by the tidb_opt_join_reorder_threshold variable. If the number of nodes participating in Join Reorder is greater than this threshold, TiDB uses the greedy algorithm. Otherwise, TiDB uses the dynamic programming algorithm.
Limitations of Join Reorder algorithms
The current Join Reorder algorithms have the following limitations:
- Limited by the calculation methods of the result sets, the algorithm cannot ensure it selects the optimum join order.
- The Join Reorder algorithm's support for Outer Join is controlled by the
tidb_enable_outer_join_reordersystem variable. - Currently, the dynamic programming algorithm cannot perform Join Reorder for outer join.
Currently, the STRAIGHT_JOIN syntax is supported in TiDB to force a join order. For more information, refer to Description of the syntax elements.